স্বয়ংক্রিয় সক্রিয় পরিমাপ যন্ত্র
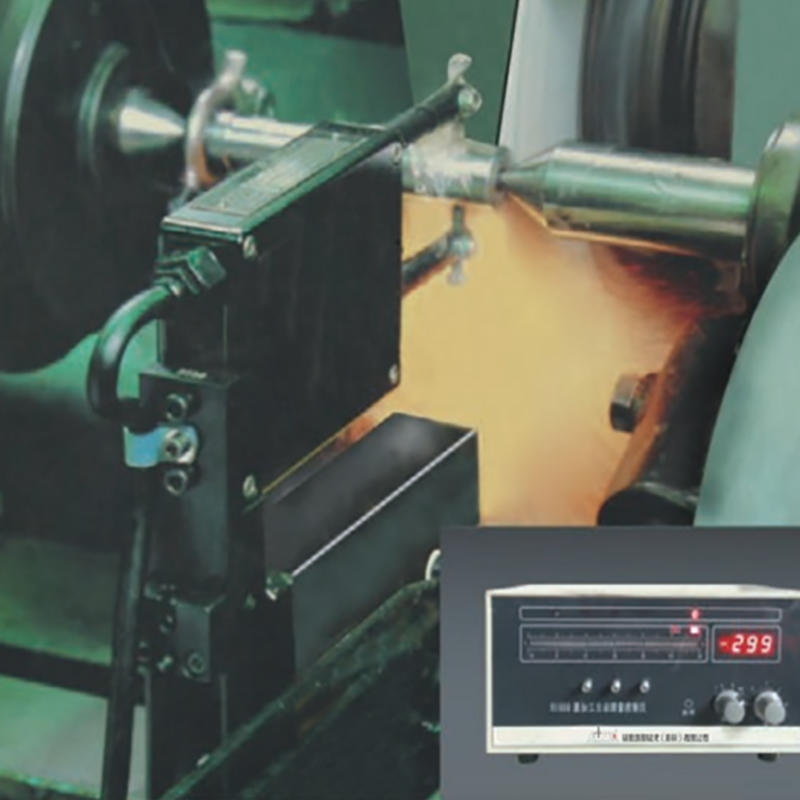
পণ্য প্রয়োগ
ভবিষ্যদ্বাণীমূলক নিয়ন্ত্রণের ক্ষেত্রে প্রযোজ্য নমনীয় ব্যবস্থার ভবিষ্যদ্বাণীমূলক নিয়ন্ত্রণ হল প্রক্রিয়াকরণে পরিমাপ এবং প্রক্রিয়াকরণ পরিমাপকে একত্রিত করে একটি বন্ধ-লুপ পরিমাপ ব্যবস্থা তৈরি করা যাতে মেশিন টুলের প্রক্রিয়াকরণ অবস্থা নিয়ন্ত্রণ করা যায় এবং নিশ্চিত করা যায় যে বর্জ্য প্রক্রিয়াকরণের কোনও নিয়ন্ত্রণ ব্যবস্থা নেই। একটি মেশিন টুলের নমনীয় নিয়ন্ত্রণ একটি ন্যূনতম বন্ধ-লুপ সিস্টেমে একটি নিয়ামক দিয়ে অর্জন করা যেতে পারে যা প্রক্রিয়াকরণ এবং পোস্ট-প্রসেসিং পরিমাপ করতে সক্ষম। কম্পিউটারের সাথে পরিমাপ যন্ত্র, উপরের মেশিন এবং নীচের মেশিনের সাথে আরও যোগাযোগ, স্বয়ংক্রিয় লাইনের সামগ্রিক একীভূত ব্যবস্থাপনা উপলব্ধি করতে পারে। তাই আপনি বর্জ্য প্রক্রিয়াকরণ ছাড়াই একটি অত্যন্ত দক্ষ স্বয়ংক্রিয় উৎপাদন লাইন তৈরি করতে পারেন। এছাড়াও, সনাক্তকরণের জন্য বিভিন্ন বাহ্যিক বস্তুর সাথে সম্পর্কিত বিভিন্ন সেন্সর নিশ্চিত করতে পারে যে পুরো সিস্টেমটি বহিরাগত দ্বারা প্রভাবিত না হয়।
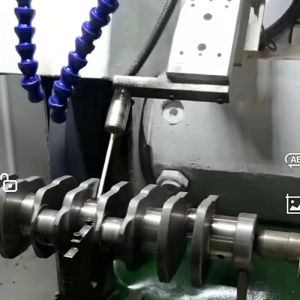
সক্রিয় পরিমাপের সূচক প্রক্রিয়া প্রক্রিয়াকরণের সময়, পরিমাপ যন্ত্রটি যেকোনো সময় ওয়ার্কপিস পরিমাপ করে এবং পরিমাপের ফলাফল নিয়ামককে ইনপুট করে। পূর্ব-নির্ধারিত সংকেত বিন্দুতে, নিয়ামক মেশিন টুলের ক্রিয়াকলাপ নিয়ন্ত্রণ করার জন্য একটি সংকেত প্রেরণ করে। উদাহরণস্বরূপ, গ্রাইন্ডিং প্রক্রিয়ায়, মোটা গ্রাইন্ডিং ফিড, যখন প্রথম আকারের সংকেত বিন্দু, নিয়ামক সংকেত দেয়, তখন মেশিন টুল মোটা গ্রাইন্ডিং থেকে সূক্ষ্ম গ্রাইন্ডিংয়ে স্যুইচ করে, যখন দ্বিতীয় আকারের সংকেত বিন্দু, মেশিন টুল সূক্ষ্ম গ্রাইন্ডিং ফিড থেকে হালকা গ্রাইন্ডিংয়ে স্যুইচ করে (কোনও স্পার্ক গ্রাইন্ডিং নেই), যখন তৃতীয় সংকেত বিন্দু, ওয়ার্কপিসটি প্রিসেট আকারে, গ্রাইন্ডিং হুইল দ্রুত ফিরে আসে এবং পরবর্তী চক্রের স্ট্যান্ডবাই অবস্থায় প্রবেশ করে।
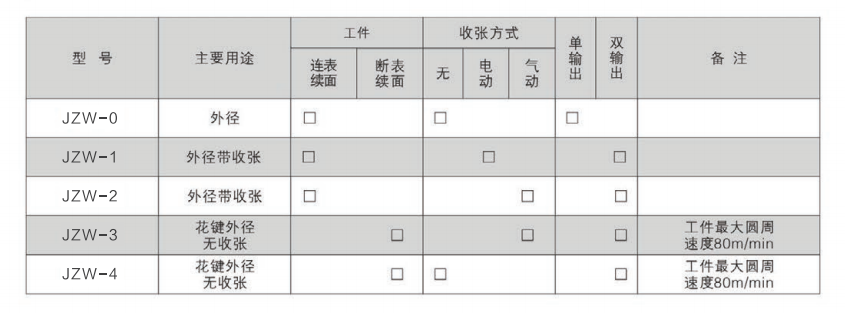
পণ্য পরামিতি
পণ্য ভিডিও

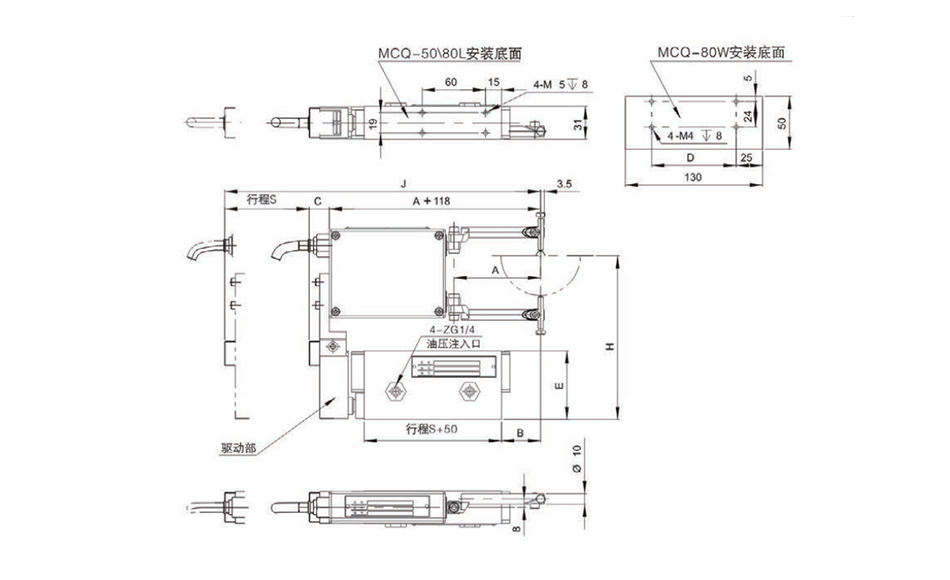
পণ্যের আকার